[2023] DAL RILIEVO 3D AL DIGITAL TWIN: EXCURSUS SULL'EVOLUZIONE TECNOLOGICA NEL CAMPO DELLA GEOMATICA OPERATIVA
[2023] DAL RILIEVO 3D AL DIGITAL TWIN: EXCURSUS SULL'EVOLUZIONE TECNOLOGICA NEL CAMPO DELLA GEOMATICA OPERATIVA
DOWNLOAD PDF | 1.2 MB [ITA]
Come l’evoluzione delle tecnologie della geomatica ha portato dal concetto di rilevamento 3D all’attuale concetto rivoluzionario del Digital Twin, il gemello digitale della realtà. Lo sviluppo esponenziale delle tecnologie hardware e software di rilevamento digitale, unita ad una sempre più dettagliata documentazione fotografica, stanno rivoluzionando in modo epocale l’approccio al rilevamento e documentazione del reale.
 [2022] ACCURACY IMPROVEMENT OF A IMMS IN AN URBAN SCENARIO
[2022] ACCURACY IMPROVEMENT OF A IMMS IN AN URBAN SCENARIO
DOWNLOAD PDF | 1.4 MB [ENG]
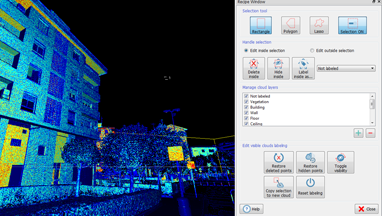
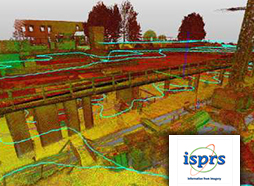
Indoor Mobile Mapping Systems (IMMSs) technologies are becoming increasingly popular thanks to the possibility of acquiring a massive amount of 3D data in a fast and effective way in those areas where GNSS signal is unavailable, like urban canyons, densely vegetated areas, underground sites and buildings. They offer an efficient way to produce point clouds but with noticeably lower accuracy than traditional Terrestrial Laser Scanning (TLS). The present paper wants to analyse two different methods to improve the accuracy of the point cloud coming from an IMMS survey in a vast urban scenario.
 [2022] LIDAR IMMS VS HANDHELD MULTI CAMERA SYSTEM: A STRESS-TEST IN A MOUNTAIN TRAIL-PATH
[2022] LIDAR IMMS VS HANDHELD MULTI CAMERA SYSTEM: A STRESS-TEST IN A MOUNTAIN TRAIL-PATH
DOWNLOAD PDF | 1.9 MB [ENG]
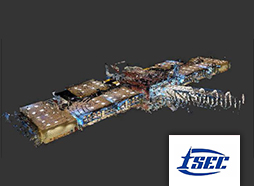
Indoor Mobile Mapping Systems (IMMS) are attracting growing attention, especially when LiDAR sensors are considered, thanks to the possibility to obtain a wide range and complete data in those areas where GNSS signal is not available. However, the drift error that accumulates during the acquisition is often inadequate in the absence of quality constraints in the case of extensive acquisitions. Concurrently, recent developments regarding multicamera mobile solutions have shown promising results in containing the drift error, but the data produced are too noisy and not enough complete in terms of acquisition range.
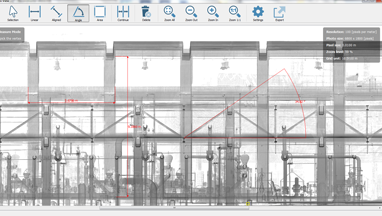
 [2022] INDOOR MOBILE MAPPING SYSTEMS AND (BIM) DIGITAL MODELS FOR CONSTRUCTION PROGRESS MONITORING
[2022] INDOOR MOBILE MAPPING SYSTEMS AND (BIM) DIGITAL MODELS FOR CONSTRUCTION PROGRESS MONITORING
DOWNLOAD PDF | 912 KB [ENG]
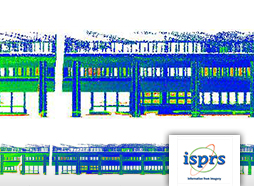
Technological developments of the last decades are making it possible to speed up different processes involved in construction projects. Terrestrial laser scanners (TLS) are commonly used to map a construction site due to the level of accuracy provided, but indoor mobile mapping systems (iMMS) could offer a more efficient approach by speeding up the acquisition time and capturing all the details of the site just by walking through it, provided that the point cloud is accurate enough for the purpose of interest.
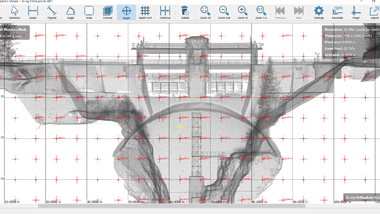
 [2022] MODELLI DIGITALI DELLE GRANDI FRANE ALPINE TRA ITALIA E SVIZZERA
[2022] MODELLI DIGITALI DELLE GRANDI FRANE ALPINE TRA ITALIA E SVIZZERA
DOWNLOAD PDF | 2 MB [ITA]
La ricerca in corso, sostenuta dal Progetto Interreg Italia-Svizzera A.M.AL.PI.18, riguarda l’elaborazione e gestione dei dati provenienti da attività di indagine finalizzate a produrre ipotesi e modelli utili alla ricostruzione delle cause, modalità e degli effetti di eventi franosi.
 [2022] SCAN-TO-BIM EFFICIENT APPROACH TO EXTRACT BIM MODELS FROM HIGH PRODUCTIVE INDOOR MOBILE MAPPING SURVEY
[2022] SCAN-TO-BIM EFFICIENT APPROACH TO EXTRACT BIM MODELS FROM HIGH PRODUCTIVE INDOOR MOBILE MAPPING SURVEY
DOWNLOAD PDF | 780 KB [ENG]
Building Information Modeling represents one of the most interesting developments in construction fields in the last 20 years. BIM process supports the creation of intelligent data that can be used throughout the life cycle of a construction project. Where a project involves a pre-existing structure, reality capture can provide the most critical information. The purpose of this paper is to describe an efficient approach to extract 3D models using high productive indoor Mobile Mapping Systems (iMMS) and an optimized scan-to-BIM workflow.
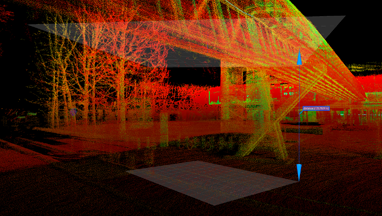
 [2021] INTEGRATED LASER SCANNER TECHNIQUES TO PRODUCE HIGH-RESOLUTION DTM OF VEGETATED TERRITORY
[2021] INTEGRATED LASER SCANNER TECHNIQUES TO PRODUCE HIGH-RESOLUTION DTM OF VEGETATED TERRITORY
DOWNLOAD PDF | 1.6 MB [ENG]
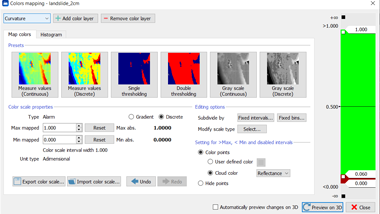
The paper presents the first part of a research project concerning the creation of 3D terrain models useful to understand landslide movements. Thus, it illustrates the creation process of a multi-source high-resolution Digital Terrain Model (DTM) in very dense vegetated areas obtained by integrating 3D data coming from three sources, starting from long and medium-range Terrestrial Laser Scanner up to a Backpack Indoor Mobile Mapping System.
 [2021] INVESTIGATING THE PERFORMANCE OF A HANDHELD MOBILE MAPPING SYSTEM IN DIFFERENT OUTDOOR SCENARIOS
[2021] INVESTIGATING THE PERFORMANCE OF A HANDHELD MOBILE MAPPING SYSTEM IN DIFFERENT OUTDOOR SCENARIOS
DOWNLOAD PDF | 400 KB [ENG]
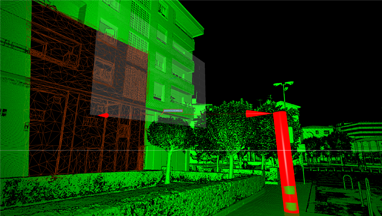
In recent years, portable Mobile Mapping Systems (MMSs) are emerging as valuable survey instruments for fast and efficient mapping of both internal and external environments. The aim of this work is to assess the performance of a commercial handheld MMS, Gexcel HERON Lite, in two different outdoor applications: 1) the mapping of a large building (a standard use-case scenario of this technology); 2) the survey of a torrent reach (a field in which portable systems are not yet widely employed).
 [2021] DIGITAL COMMUNICATION TECHNOLOGIES TO SUPPORT END-USERS LEARNING FOR A SAFE RETURN TO SCHOOL DURING COVID-19
[2021] DIGITAL COMMUNICATION TECHNOLOGIES TO SUPPORT END-USERS LEARNING FOR A SAFE RETURN TO SCHOOL DURING COVID-19
DOWNLOAD PDF | 620 KB [ENG]
The paper provides support for the definition of COVID-19 protocols in order to allow the safe re-opening of an educational building. It also derives a reusable approach extendable to other building typologies. The integrated adoption of multiple simulation-oriented technologies is investigated.
 [2021] DIGITALIZATION IN THE CONSTRUCTION SECTOR (Analytical Report - European Construction Sector Observatory)
[2021] DIGITALIZATION IN THE CONSTRUCTION SECTOR (Analytical Report - European Construction Sector Observatory)
DOWNLOAD PDF | 4.2 MB [ENG]
This Analytical Report is part of the European Construction Sector Observatory (ECSO) project. It aims to describe the state of play of digitalisation in the EU construction sector and identify some of its main drivers and challenges. In doing so, the report provides information, evidence and lessons learnt aiming to support a wide range of stakeholders, including policymakers, who wish to support the integration of digital technologies in the construction sector.
 [2020] INDOOR MOBILE MAPPING SYSTEM AND CROWD SIMULATION TO SUPPORT SCHOOL REOPENING BECAUSE OF COVID-19: A CASE STUDY
[2020] INDOOR MOBILE MAPPING SYSTEM AND CROWD SIMULATION TO SUPPORT SCHOOL REOPENING BECAUSE OF COVID-19: A CASE STUDY
DOWNLOAD PDF | 500 KB [ENG]
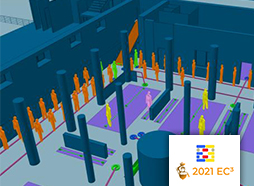
Occupancy analyses represent a crucial topic for building performance. At present, this is even true because of the pandemic emergency due to SARS-CoV-2 and the need to support the functional analysis of building spaces in relation to social distancing rules. Moreover, the need to assess the suitability of spaces in high occupancy buildings as the educational ones, for which occupancy evaluations result pivotal to ensuring the safety of the end-users in their daily activities, is a priority. The proposed paper investigates the steps that are needed to secure a safe re-opening of an educational building.
 [2019] FAST INDOOR MAPPING TO FEED AN INDOOR DB FOR BUILDING AND FACILITY MANAGEMENT
[2019] FAST INDOOR MAPPING TO FEED AN INDOOR DB FOR BUILDING AND FACILITY MANAGEMENT
DOWNLOAD PDF | 1 MB [ENG]
Facility Management activities require collecting and organising a large amount of information about a building, for example, geometry, MEP structures, lighting and antifire devices, typologies of furniture, paving characteristics, structures and more. The success story presented in the paper describes how using an Indoor Mobile Mapping approach, it is possible to satisfy the need to acquire plant views of a large part of buildings and, simultaneously, to record 3D+Full resolution RGB images. Thanks to this fast acquisition it is later possible to feed a 2D/3D database, identifying the main objects needed to support a facility management process.
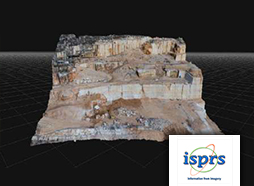 [2018] OPEN PIT MINE 3D MAPPING BY TLS AND DIGITAL PHOTOGRAMMETRY. 3D MODEL UPDATE THANKS TO A SLAM-BASED APPROACH
[2018] OPEN PIT MINE 3D MAPPING BY TLS AND DIGITAL PHOTOGRAMMETRY. 3D MODEL UPDATE THANKS TO A SLAM-BASED APPROACH
DOWNLOAD PDF | 220 KB [ENG]
The University of Brescia has realised a project to map in 3D an open pit mine located in Botticino, a famous location of marble extraction close to Brescia in North Italy. Terrestrial Laser Scanner 3D point clouds combined with RGB images and digital photogrammetry from UAV have been used to map a large part of the cave. By rigorous and well know procedures a 3D point cloud and mesh model have been obtained using an easy and rigorous approach.
")
")